
Sensation and Perception 9th Edition by Bruce Goldstein
Edition 9ISBN: 978-1133958475Sensation and Perception 9th Edition by Bruce Goldstein
Edition 9ISBN: 978-1133958475 Exercise 2
How is the idea of regularities of the environment that we introduced in Chapter related to the cognitive factors that determine where people look in Figure 8?
Regularities in the Environment: Information for Perceiving
Although people make use of regularities in the environment to help them perceive, they are often unaware of the specific information they are using. This aspect of perception is similar to what occurs when we use language. Even though people easily string words together to create sentences in conversations, they may not know the rules of grammar that specify how these words are being combined. Similarly, we easily use our knowledge of regularities in the environment to help us perceive, even though we may not be able to identify the specific information we are using. We can distinguish two types of regularities: physical regularities and semantic regularities.
Physical Regularities Physical regularities are regularly occurring physical properties of the environment. For example, there are more vertical and horizontal orientations in the environment than oblique (angled) orientations. This occurs in human-made environments (for example, buildings contain many horizontals and verticals) and also in natural environments (trees and plants are more likely to be vertical or horizontal than slanted) (Coppola et al., 1998). It is, therefore, no coincidence that people can perceive horizontals and verticals more easily than other orientations-the oblique effect we introduced in Chapter 1 (see page 11) (Appelle, 1972; Campbell et al., 1966; Orban et al., 1984).
Another physical regularity is that objects in the environment often have homogeneous colors and nearby objects have different colors. Thus, if we pick a point on the scene in Figure 1 (such as A) and move slightly away from that point (to B), it is likely that the two points are on the same object if the color is the same. If, however, we move to C, the color changes, which means it is likely we are looking at a different object. While you are looking at this scene, see if you can find examples of good continuation and good figure.
The following demonstration illustrates yet another physical regularity.
DEMONSTRATION
Shape From Shading
What do you perceive in Figure 2 ? Do some of the discs look as though they are sticking out, like parts of three-dimensional spheres, and others appear to be indentations? If you do see the discs in this way, notice that the ones that appear to be sticking out are arranged in a square. After observing this, turn the page over so the small dot is on the bottom. Does this change your perception?
Figures 3 and 4 show that if we assume that light is coming from above (which is usually the case in the environment), then patterns like the circles that are light on the top would be created by an object that bulges out ( Figure 3 ), but a pattern like the circles that are light on the bottom would be created by an indentation in a surface ( Figure 4 ). The assumption that light is coming from above has been called the light-from-above assumption (Kleffner Ramachandran, 1992). Apparently, people make the light-from-above assumption because most light in our environment comes from above. This includes the sun, as well as most artificial light sources.
Another example of the light-from-above assumption at work is provided by the two pictures in Figure 5. Figure 5a shows indentations created by people walking in the sand. But when we turn this picture upside down, as in Figure 5b , then the indentations in the sand become rounded mounds.
It is clear from these examples of physical regularities in the environment that one of the reasons humans are able to perceive and recognize objects and scenes so much better than computer-guided robots is that our system is customized to respond to the physical characteristics of our environment. But this customization goes beyond physical characteristics. It also occurs because we have learned about what types of objects typically occur in specific types of scenes.
Semantic Regularities In language, semantics refers to the meanings of words or sentences. Applied to perceiving scenes, semantics refers to the meaning of a scene. This meaning is often related to the function of a scene-what happens within it. For example, food preparation, cooking, and perhaps eating occur in a kitchen; waiting around, buying tickets, checking luggage, and going through security checkpoints happens in airports. Semantic regularities are the characteristics associated with the functions carried out in different types of scenes.
One way to demonstrate that people are aware of semantic regularities is simply to ask them to imagine a particular type of scene or object, as in the following demonstration.
DEMONSTRATION
Visualizing Scenes and Objects
Your task in this demonstration is simple-visualize or simply think about the following scenes and objects:
An office
The clothing section of a department store
A microscope
A lion
Most people who have grown up in modern society have little trouble visualizing an office or the clothing section of a department store. What is important about this ability, for our purposes, is that part of this visualization involves details within these scenes. Most people see an office as having a desk with a computer on it, bookshelves, and a chair. The department store scene may contain racks of clothes, a changing room, and perhaps a cash register.
What did you see when you visualized the microscope or the lion? Many people report seeing not just a single object, but an object within a setting. Perhaps you perceived the microscope sitting on a lab bench or in a laboratory, and the lion in a forest or on a savannah or in a zoo.
An example of the knowledge we have of things that typically belong in certain scenes is provided by a classic experiment by Stephen Palmer (1975), using stimuli like the picture in Figure 6. Palmer first presented a context scene such as the one on the left and then briefly flashed one of the target pictures on the right. When Palmer asked observers to identify the object in the target picture, they correctly identified an object like the loaf of bread (which is appropriate to the kitchen scene) 80 percent of the time, but correctly identified the mailbox or the drum (two objects that don't fit into the scene) only 40 percent of the time. Apparently, Palmer's observers were using their knowledge about kitchens to help them perceive the briefly flashed loaf of bread.
The effect of semantic regularities is also illustrated in Figure 7 , which is called "the multiple personalities of a blob" (Oliva Torralba, 2007). The blob is perceived as different objects depending on its orientation and the context within which it is seen. It appears to be an object on a table in (b), a shoe on a person bending down in (c), and a car and a person crossing the street in (d), even though it is the same shape in all of the pictures.
Figure 1
Objects in the environment often have homogeneous colors. See text for details.

Figure 2
Some of these discs are perceived as jutting out and some are perceived as indentations.
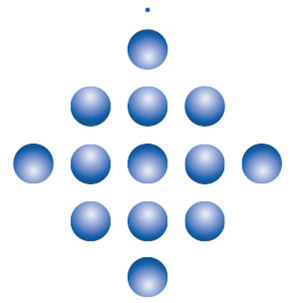
Figure 3
Explanation for your perception of figure 2. Light coming from above will illuminate the top of a shape that is jutting out

Figure 4
The bottom of an indentation

Figure 5
Why does (a) look like indentations in the sand and (b) look like mounds of sand? See the text for explanation.
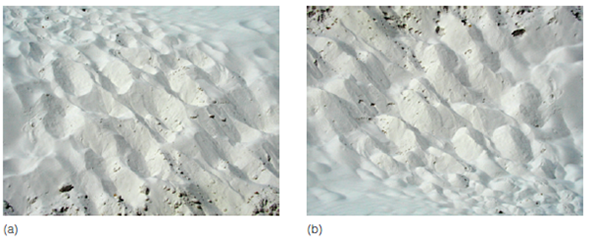
Figure 6
Stimuli used in Palmer's (1975) experiment. The scene at the left is presented first, and the observer is then asked to identify one of the objects on the right.
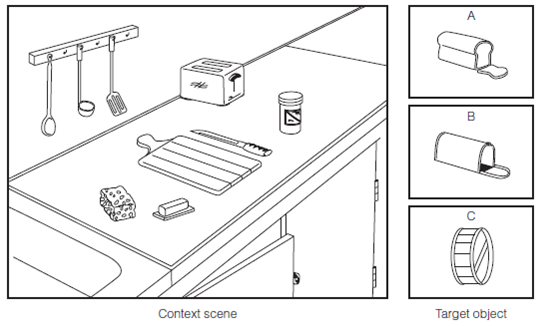
Figure 7
What we expect to see in different contexts influences our interpretation of the identity of the "blob" inside the circles. Part (d) adapted from Oliva, A., Torralba, A., The role of context in object recognition, Trends in Cognitive Sciences , Vol. 11, 12. Copyright 2007, with permission from Elsevier.
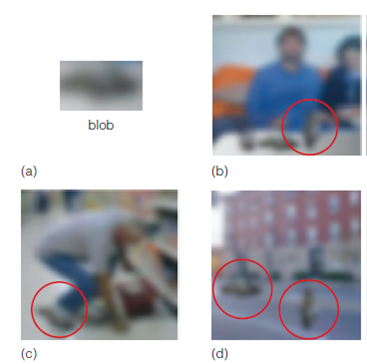
Figure 8
The red shirt is highly salient because of its color compared to the rest of the scene.

Regularities in the Environment: Information for Perceiving
Although people make use of regularities in the environment to help them perceive, they are often unaware of the specific information they are using. This aspect of perception is similar to what occurs when we use language. Even though people easily string words together to create sentences in conversations, they may not know the rules of grammar that specify how these words are being combined. Similarly, we easily use our knowledge of regularities in the environment to help us perceive, even though we may not be able to identify the specific information we are using. We can distinguish two types of regularities: physical regularities and semantic regularities.
Physical Regularities Physical regularities are regularly occurring physical properties of the environment. For example, there are more vertical and horizontal orientations in the environment than oblique (angled) orientations. This occurs in human-made environments (for example, buildings contain many horizontals and verticals) and also in natural environments (trees and plants are more likely to be vertical or horizontal than slanted) (Coppola et al., 1998). It is, therefore, no coincidence that people can perceive horizontals and verticals more easily than other orientations-the oblique effect we introduced in Chapter 1 (see page 11) (Appelle, 1972; Campbell et al., 1966; Orban et al., 1984).
Another physical regularity is that objects in the environment often have homogeneous colors and nearby objects have different colors. Thus, if we pick a point on the scene in Figure 1 (such as A) and move slightly away from that point (to B), it is likely that the two points are on the same object if the color is the same. If, however, we move to C, the color changes, which means it is likely we are looking at a different object. While you are looking at this scene, see if you can find examples of good continuation and good figure.
The following demonstration illustrates yet another physical regularity.
DEMONSTRATION
Shape From Shading
What do you perceive in Figure 2 ? Do some of the discs look as though they are sticking out, like parts of three-dimensional spheres, and others appear to be indentations? If you do see the discs in this way, notice that the ones that appear to be sticking out are arranged in a square. After observing this, turn the page over so the small dot is on the bottom. Does this change your perception?
Figures 3 and 4 show that if we assume that light is coming from above (which is usually the case in the environment), then patterns like the circles that are light on the top would be created by an object that bulges out ( Figure 3 ), but a pattern like the circles that are light on the bottom would be created by an indentation in a surface ( Figure 4 ). The assumption that light is coming from above has been called the light-from-above assumption (Kleffner Ramachandran, 1992). Apparently, people make the light-from-above assumption because most light in our environment comes from above. This includes the sun, as well as most artificial light sources.
Another example of the light-from-above assumption at work is provided by the two pictures in Figure 5. Figure 5a shows indentations created by people walking in the sand. But when we turn this picture upside down, as in Figure 5b , then the indentations in the sand become rounded mounds.
It is clear from these examples of physical regularities in the environment that one of the reasons humans are able to perceive and recognize objects and scenes so much better than computer-guided robots is that our system is customized to respond to the physical characteristics of our environment. But this customization goes beyond physical characteristics. It also occurs because we have learned about what types of objects typically occur in specific types of scenes.
Semantic Regularities In language, semantics refers to the meanings of words or sentences. Applied to perceiving scenes, semantics refers to the meaning of a scene. This meaning is often related to the function of a scene-what happens within it. For example, food preparation, cooking, and perhaps eating occur in a kitchen; waiting around, buying tickets, checking luggage, and going through security checkpoints happens in airports. Semantic regularities are the characteristics associated with the functions carried out in different types of scenes.
One way to demonstrate that people are aware of semantic regularities is simply to ask them to imagine a particular type of scene or object, as in the following demonstration.
DEMONSTRATION
Visualizing Scenes and Objects
Your task in this demonstration is simple-visualize or simply think about the following scenes and objects:
An office
The clothing section of a department store
A microscope
A lion
Most people who have grown up in modern society have little trouble visualizing an office or the clothing section of a department store. What is important about this ability, for our purposes, is that part of this visualization involves details within these scenes. Most people see an office as having a desk with a computer on it, bookshelves, and a chair. The department store scene may contain racks of clothes, a changing room, and perhaps a cash register.
What did you see when you visualized the microscope or the lion? Many people report seeing not just a single object, but an object within a setting. Perhaps you perceived the microscope sitting on a lab bench or in a laboratory, and the lion in a forest or on a savannah or in a zoo.
An example of the knowledge we have of things that typically belong in certain scenes is provided by a classic experiment by Stephen Palmer (1975), using stimuli like the picture in Figure 6. Palmer first presented a context scene such as the one on the left and then briefly flashed one of the target pictures on the right. When Palmer asked observers to identify the object in the target picture, they correctly identified an object like the loaf of bread (which is appropriate to the kitchen scene) 80 percent of the time, but correctly identified the mailbox or the drum (two objects that don't fit into the scene) only 40 percent of the time. Apparently, Palmer's observers were using their knowledge about kitchens to help them perceive the briefly flashed loaf of bread.
The effect of semantic regularities is also illustrated in Figure 7 , which is called "the multiple personalities of a blob" (Oliva Torralba, 2007). The blob is perceived as different objects depending on its orientation and the context within which it is seen. It appears to be an object on a table in (b), a shoe on a person bending down in (c), and a car and a person crossing the street in (d), even though it is the same shape in all of the pictures.
Figure 1
Objects in the environment often have homogeneous colors. See text for details.
Figure 2
Some of these discs are perceived as jutting out and some are perceived as indentations.
Figure 3
Explanation for your perception of figure 2. Light coming from above will illuminate the top of a shape that is jutting out
Figure 4
The bottom of an indentation
Figure 5
Why does (a) look like indentations in the sand and (b) look like mounds of sand? See the text for explanation.
Figure 6
Stimuli used in Palmer's (1975) experiment. The scene at the left is presented first, and the observer is then asked to identify one of the objects on the right.
Figure 7
What we expect to see in different contexts influences our interpretation of the identity of the "blob" inside the circles. Part (d) adapted from Oliva, A., Torralba, A., The role of context in object recognition, Trends in Cognitive Sciences , Vol. 11, 12. Copyright 2007, with permission from Elsevier.
Figure 8
The red shirt is highly salient because of its color compared to the rest of the scene.
Explanation Verified
Verified
The idea of regularities in the environm...
Sensation and Perception 9th Edition by Bruce Goldstein
Why don’t you like this exercise?
Other Minimum 8 character and maximum 255 character
Character 255



